
产品选型

| 产品名称 | E9v2卡片电脑 | E9v3卡片电脑 | TQiMX6Q_BASEC |
|---|---|---|---|
| CPU、架构、主频 | NXP i.MX6Q Cortex-A9 4x1GHz | NXP i.MX6Q Cortex-A9 4x1GHz | NXP i.MX6Q Cortex-A9 4x1GHz |
| 内存 | 2GB DDR3 | 2GB DDR3 | 2GB DDR3 |
| FLASH | 8GB eMMC | 8GB eMMC | 8GB eMMC |
| 设计工艺 | 单板 | 单板 | 核心板+底板 |
| 核心板引脚数 | 无 | 无 | 200 Pin |
| 电源管理芯片 | 板载 | 板载 | 板载 |
| 支持系统 | Android 4.3/6.0、Ubuntu16.04、 | Android 4.3/6.0、Ubuntu16.04、 | Android 4.3/6.0、Ubuntu16.04、 |
| Linux 3.0.35+QT4.5、Linux 4.1 +QT 5.5 | Linux 3.0.35+QT4.5、Linux 4.1 +QT 5.5 | Linux 3.0.35+QT4.5、Linux 4.1 +QT 5.5 | |
| 底板层数、尺寸 | 8层板(单板); 72*100mm | 8层板(单板); 72*100mm | 底板:4层;180*130mm;核心板:8层板;80*55mm |
| 底板供电电源 | 5V2A | 12V1A | 12V1A |
| USB_Host | 4路(2.0),其中2路扩展接口引出 | 4路(2.0),其中2路扩展接口引出 | 3路(2.0) |
| USB_OTG | 1路 | 1路 | 1路 |
| 串口 | 4路(1路调试串口,3路扩展接口引出) | 4路(1路调试串口,3路扩展接口引出) | 5路,2路RS232,5路TTL(2路与RS232复用) |
| 以太网 | 1000/100/10 Mbps,RJ45接口 | 1000/100/10 Mbps,RJ45接口 | 1000/100/10Mbps,RJ45接口 |
| GPU | GC2000 | GC2000 | GC2000 |
| 硬盘接口 | SATA II 3Gbps | SATA II 3Gbps | 3Gbps SATA II接口,带硬盘电源接口 |
| GPIO | 15路可中断IO口,扩展接口引出 | 15路可中断IO口,扩展接口引出 | 1路可中断IO口,扩展接口引出 |
| GPIO口电平 | 3.3V(适用范围广) | 3.3V(适用范围广) | 无 |
| PWM | 3路,扩展接口引出 | 3路,扩展接口引出 | 2路PWM,扩展接口引出 |
| 多媒体编解码 | 1080P h.264视频硬件编解码,支持双720P视频编码 | 1080P h.264视频硬件编解码,支持双720P视频编码 | 1080P h.264视频硬件编解码,支持双720P视频编码 |
| PCIE接口 | 无 | 无 | 1路Mini-PCIe接口,支持3G/4G |
| SPI | 1路 | 1路 | 1路 |
| IIC | 3路 | 3路 | 3路 |
| CAN总线接口 | 2路 | 2路 | 2路 |
| 音频 | MIC、PHONE、SPK | MIC、PHONE、SPK | MIC、PHONE、SPK |
| LCD | 40P 0.5FPC;最大分辨率:1080p | 40P 0.5FPC;最大分辨率:1080p | 40P 0.5FPC;最大分辨率:1080p |
| SD卡 | 1路 | 1路 | 1路 |
| RTC | 1路 | 1路 | 1路 |
| HDMI | 1路;最大分辨率:1080p | 1路;最大分辨率:1080p | 1路HDMI V1.4;最大分辨率:1080p |
| VGA | 1路;最大分辨率:1080p | 1路;最大分辨率:1080p | 无 |
| LVDS | 双8标准接口;最大分辨率:1080p | 双8标准接口;最大分辨率:1080p | 双8标准接口;最大分辨率:1080p |
| SDIO WIFI | 无 | 无 | 有 |
| Camera | 1路,CMOS接口 | 1路,CMOS接口 | 1路,CMOS接口 |
| 板卡等级,工作环境温度 | 商业级(-20℃至 +85℃) | 商业级(-20℃至 +85℃)(工业级可选) | 商业级(-20℃至 +85℃)(工业级可选) |
| 配套模块 | 链接 | 链接 | 链接 |
| 产品图片 |
|
|
|
| 应用领域 | 适用于户外广告、电梯广告、可视对讲、会议系统、安防监控、智能收费系统、排队机、道路流量监控、手持设备、仪 器仪表等 | 适用于户外广告、电梯广告、可视对讲、会议系统、安防监控、智能收费系统、排队机、道路流量监控、手持设备、仪器仪表等 | 适用于车载中控/仪表、电力测试设备、医疗仪器工业控制、可视对讲、会议系统、安防监控、智能收费系统、道路流量监控、排队机、售卖新机、工业仪器仪表、HMI,轨道交通等 |
烧录固件
- 启动方式介绍
注:下表的拨码为网口朝上,向上为 1,向下为 0。
| MODE | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| EMMC启动 | 1 | 1 | 0 | 1 |
| SD卡启动 | 1 | 0 | 0 | 0 |
| USB启动 | 1 | 0 | 0 | 1 |
- 烧录相关说明
出厂默认已经烧写Android系统,EMMC启动模式下可以正常启动系统,如果需要更换系统,则需要使用USB或者SD卡烧录方式重新烧录板子。
出厂固件
注:烧录前建议先连接串口线,如烧录失败,根据串口打印信息分析错误原因。
USB烧录
- 将开发板启动方式拨为USB启动(1001),通过USB otg接口连接板子和电脑;
- 下载mfgtools_V3.6.1.zip烧写工具,详细烧录信息请查看TQIMX6烧写手册.pdf第一、二章节。
- 烧录成功后断电,拨回EMMC启动(1101)启动。
SD卡烧录
- 制作SD烧录卡
(1)Windows下制作烧录卡
下载Windows_TQSDMaker,详细的Windows下制作烧录卡信息请查看TQSDMaker用户使用手册.pdf。
(2)Ubuntu下制作烧录卡
下载images_new_v12.1.tar,详细的Ubuntu下制作烧录卡信息请查看TQIMX6烧写手册.pdf第三章。 - 成功制作SD烧录卡后,将拨码启动方式拨为1000(SD卡启动),插卡上电进行烧录操作;
- 烧录成功会自行启动系统,断电拨回EMMC启动(1101)启动。
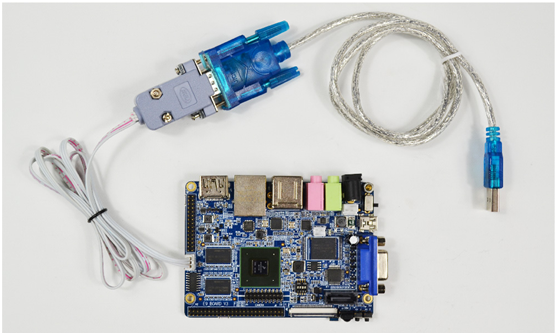
串口调试
连接串口线
Windows平台使用终端
因为在window平台下只是作为测试使用,并没有在上面进行开发,所以搭建过程较简单,只是安装一个串口终端即可。 首先安装SecureCRT安装结束后,单击SecureCRT.exe,打开SecureCRT,如下图所示:
单击上图中红色框的图标,出现如下图设置框:
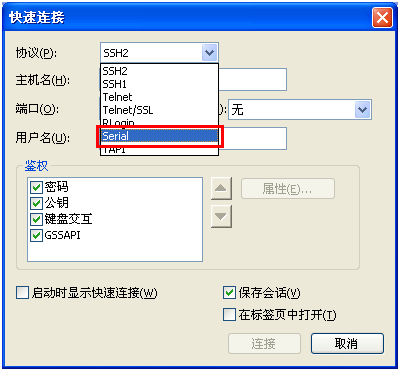
在协议里面选择Serial,出现如下图所示的对话框,详细设置参考下图。
注意:端口选项部分根据您的实际使用的端口进行配置,其他选项请一定配置如下图所示。
说明:RTS/CTS一定不能选,否则可能出现串口有输出,没法输入的情况。
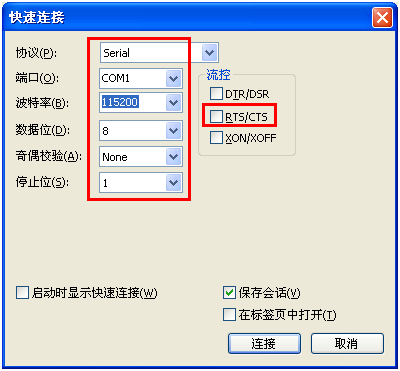
配置完毕后,单击上图的“连接”选项即可连通串口。
说明1:当打开了多个串口工具,并且他们还都使用同一个串口端口,那么肯定会出现后来打开的软件报告端口忙的错误,解决办法:关掉不需要的串口工具。
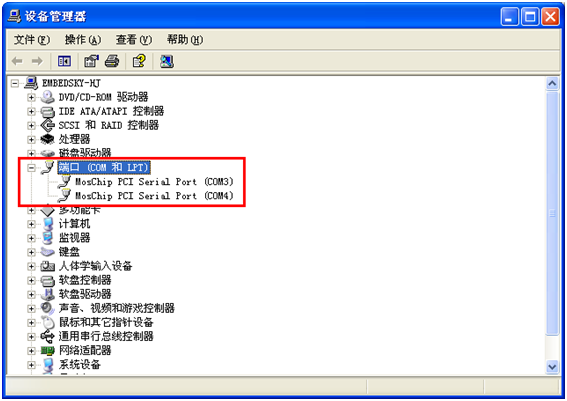
说明2:在设备管理器中可以查看您的电脑的串口设备名,下图中红色框内的COM3和COM4就是本手册编写者的电脑里面的串口设备名(如果是在下图所示的电脑中设置SecureCRT软件时,请将端口栏设置为COM3或COM4,而不是上图中的COM1了,这里特意用了两台不一样的电脑进行截图加以说明的),下图的COM3和COM4仅供参考,您的电脑的串口名请以实际为准;如果您的电脑没有串口设备,请使用USB转串口,USB转串口后的设备名也是COMn(n的数值以实际为准)。
Ubuntu平台使用终端
1.安装minicom
用户可以通过网络或者直接使用光盘的源码进行安装。使用网络安装需要连接互联网,更为简单方便,推荐使用。
安装minicom。
直接在终端执行:
#apt-get install minicom即可。
2.配置minicom
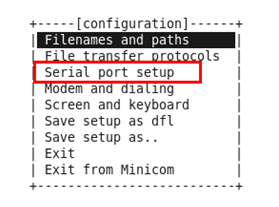
安装minicom完成后,输入命令#minicom -s启动,将出现配置菜单:使用PC键盘的上下键选中serial port setup选项后,用回车键进入串口配置。
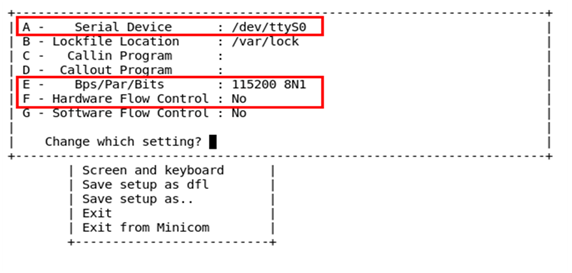
进入串口配置界面,输入A配置串口驱动为/dev/ttyS0(不管在windows中是COMn(n可以是任意数),在虚拟机的Ubuntu下均是ttyS0)后回车,如果是usb转串口设备名应该作用/dev/ttyUSBn(n为数字,视实际而定,一般为0)。输入E配置速率为115200 8N1输入F将Hardware Flow Control设为NO,回车退出。
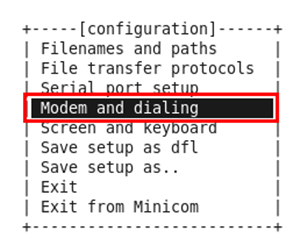
由于使用minicom作为超级终端控制路由器等设备, 而不是控制modem,所以需要修改modem and dialing。
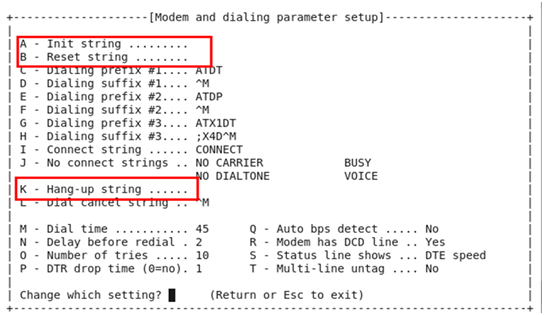
将Modem and dialing配置单中得Init string、 Reset string、Hang-up string设置为空。
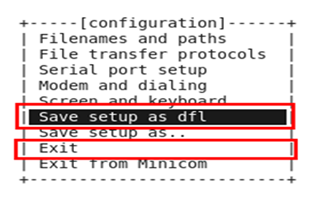
Step6、设置完成后选择Save setup as dfl选项将当前设置保存为默认设置;在配置菜单上选择Save setup as dfl保存配置单(一定要做这一步,否则下次启动minicom时还需要重新配置);选择Exit退出配置并进入minicom的操作界面。
下次需要启动minicom时,在终端中输入minicon后回车即可直接进入。命令minicom是进入串口超级终端画面,而minicom -s是配置minicom的命令。minicom是基于窗口的。要弹出所需功能的窗口,可按下ctrl-a,然后再按各功能键(a-z或A-Z)。先按ctrl-a,再按z,将出现一个帮助窗口,提供了所有命令的简述。
注意:非正常关闭minicom,会在/var/lock下创建几个文件LCK*,这几个文件可能会阻止minicom的运行,将它们删除后即可恢复。
说明1:如果您是在虚拟机中使用minicom,您需要在启动虚拟机中的Ubuntu之前先在您的虚拟机中添加串口设备,然后再启动虚拟机中的Ubuntu。还需要注意一点:当Windows中使用了串口设备(比如启动了SecureCRT软件,并且已经使用COM3这个串口端口),然后如果在虚拟机中设置的也是COM3这个端口,那么在虚拟机中的Ubuntu启动后,在minicom中是没法使用串口的,只能选择关闭SecureCRT软件,释放COM3,然后虚拟机中的Ubuntu才能够使用该串口。
说明 2:输入sudo minicom -D /dev/ttyUSB0可以直接指定USB串口设备。
扩展模块
注:本章节所列模块仅在资源下载的镜像及源码版本上适用,其他版本的源码及源码版本,不予保证功能正常使用,请以各自版本说明为准。
| 模块名称 | Android6.0 | Linux+QT5.5 | Ubuntu16.04 |
|---|---|---|---|
| 5寸高清电容屏 | OK | OK | OK |
| TN92 7寸电容/电阻屏 | OK | OK | OK |
| TN83 7寸电阻屏 | OK | OK | OK |
| 7寸高清屏 | OK | OK | OK |
| 10.4寸电阻屏 | OK | OK | OK |
| OV5640 | OK | OK | OK |
| WIFI(RTL8723+BT) | OK | OK | OK |
| 4G(SIM7600) | OK | OK | |
| 4G(N720) | OK | OK | OK |
功能配置
切换屏幕、设置网络环境等相关功能配置请查看TQIMX6_uboot菜单手册.pdf
安装编译环境
1.从资源下载章节“ubuntu工具&开发环境”进入下载ubuntu_env_install.sh,执行ubuntu_env_install.sh脚本,为Ubuntu系统安装所需环境
#./ubuntu_env_install.sh2.安装JDK 从资源下载章节“ubuntu工具&开发环境”进入下载java-1.7.0-openjdk-amd64.tar.bz2,java-7-openjdk-amd64.tar.bz2,然后在Ubuntu系统中执行:
#tar xvjf java-1.7.0-openjdk-amd64.tar.bz2 -C /usr/lib/jvm/
#tar xvjf java-7-openjdk-amd64.tar.bz2 -C /usr/lib/jvm/3.安装gcc,及Java环境: 从资源下载章节“ubuntu工具&开发环境”进入下载gcc-linaro-5.3-xxxx.tar.bz2文件,将其拷贝到根目录/opt目录下,然后在ubuntu系统中执行
#cd /opt
#tar xvjf gcc-linaro-5.3-xxxxx.tar.bz2 -C /
#sed -i '/^PATH/d' /etc/environment
#echo PATH=echo PATH=/opt/EmbedSky/gcc-linaro-5.3-2016.02-x86_64_arm-linux-gnueabihf/bin/:/usr/lib/jvm/java-7-openjdk-amd64/bin:/opt/EmbedSky/gcc-linaro-5.3-2016.02-x86_64_arm-linux-gnueabihf/qt5.5/rootfs_imx6q_V3_qt5.5_env/qt5.5_env/bin:$PATH: >> /etc/environment
#sed -i '/^CLASSPATH/d' /etc/environment
#echo CLASSPATH=/usr/lib/jvm/java-7-openjdk-amd64/lib:$CLASSPATH: >> /etc/environment
#sed -i '/^JAVA_HOME/d' /etc/environment
#echo JAVA_HOME=/usr/lib/jvm/java-7-openjdk-amd64/:$JAVA_HOME: >> /etc/environment
#source /etc/environment搭建nfs服务器
在pc机中执行以下命令,可以在ubuntu系统中搭建nfs服务器:
#apt-get install nfs-common
#mkdir /opt/nfs
#echo "/opt/nfs *(rw,sync,no_root_squash,no_subtree_check)">> /etc/exports
#/etc/init.d/nfs-kernel-server restart搭建tftp服务器
在pc机中执行以下命令,可以在ubuntu系统中搭建tftp服务器:
#apt-get install tftp-hpa tftpd-hpa
#mkdir /opt/tftp
#echo "TFTP_USERNAME=\"tftp\""> /etc/default/tftpd-hpa
#echo "TFTP_DIRECTORY=\"/opt/tftp\"">> /etc/default/tftpd-hpa
#echo "TFTP_ADDRESS=\"0.0.0.0:69\"">> /etc/default/tftpd-hpa
#echo "TFTP_OPTIONS=\"-l -c -s\"">> /etc/default/tftpd-hpa
#service tftpd-hpa restart ;注此命令需要每次开机执行一次才能使用搭建ftp服务器
在pc机中执行以下命令,可以在ubuntu系统中搭建ftp服务器:
#apt-get install vsftpd
#mkdir /opt/ftp
#useradd -d /opt/ftp -s /bin/bash ftpname
#passwd ftpname ;设置密码,例如设置为123
#service vsftpd start使用方法:
在开发板中执行ftpget -u ftpname -p 123 192.168.1.xxx zImage获取电脑中/opt/ftp目录下的zImage文件
硬件开发指南
pin脚功能
| pin | 引脚名称 | 功能描述 | 使用注意事项备注 | pin | 引脚名称 | 功能描述 | 使用注意事项备注 |
|---|---|---|---|---|---|---|---|
| 1 | GND | 地 | 2 | VDD_5V | 5V供电 | ||
| 3 | DP4 | USB功能 | 4 | DP3 | USB功能 | ||
| 5 | DM4 | 6 | DM3 | ||||
| 7 | GND | 地 | 8 | VDD_3V3 | 3.3V供电 | ||
| 9 | GPIO1_28(ENET_TX_EN) | GPIO功能 | 对应GPIO ID为28 | 10 | I2C3_SCL(EIM_D17) | I2C功能 | I2C3时钟引脚,对应节点/dev/i2c-2 |
| 11 | I2C3_SDA(EIM_D18) | I2C功能 | I2C3数据引脚,对应节点/dev/i2c-2 | 12 | EIM_D21 | 预留接口,可自行修改为GPIO等功能 | |
| 13 | EIM_D16 | 预留接口,可自行修改为GPIO等功能 | 14 | EIM_D19 | |||
| 15 | EIM_D30 | 16 | EIM_D20 | ||||
| 17 | GPIO1_27(ENET_RXD0) | GPIO功能 | 对应GPIO ID为27 | 18 | CSI0_DAT10 | 预留接口,可自行修改为GPIO等功能 | |
| 19 | SD1_CLK | USB功能 | 20 | SD3_RST | SDIO功能预留接口 | 预留接口,可自行修改为GPIO等功能 | |
| 21 | PWM2(SD1_DAT2) | PWM功能 | 对应节点/sys/class/pwm/* | 22 | DISP0_CNTRST | 预留接口,可自行修改为GPIO等功能 | |
| 23 | EIM_D22 | 预留接口,可自行修改为GPIO等功能 | 24 | EIM_D23 | 预留接口,可自行修改为GPIO等功能 | ||
| 25 | GPIO1_30(ENET_TXD0) | GPIO功能 | 对应GPIO ID为30 | 26 | CAN1_RX(GPIO_8) | can功能 | 对应节点can0 |
| 27 | CAN1_TX(GPIO_7) | can功能 | 对应节点can0 | 28 | CAN2_RX(KEY_ROW4) | 对应节点can1 | |
| 29 | CAN2_TX(KEY_COL4 | 对应节点can1 | 30 | UART4_RXD(KEY_ROW0) | UART4 | 对应节点/dev/ttySAC3 | |
| 31 | UART4_TXD(KEY_COL0) | UART4 | 对应节点/dev/ttySAC3 | 32 | UART3_RXD(EIM_D25) | UART3 | 对应节点/dev/ttySAC2 |
| 33 | UART3_TXD(EIM_D24) | UART3 | 对应节点/dev/ttySAC2 | 34 | UART2_RXD(EIM_D27) | UART2 | 对应节点/dev/ttySAC3 |
| 35 | UART2_TXD(EIM_D26) | UART2 | 对应节点/dev/ttySAC1 | 36 | UART2_CTS(EIM_D28) | ||
| 37 | UART2_RTS(EIM_D29) | 38 | CSPI2_MISO(EIM_OE) | SPI功能 | 对应节点/dev/spidev1.0 | ||
| 39 | CSPI2_MOSI(EIM_CS1) | SPI功能 | 对应节点为/dev/spidev1.0 | 40 | CSPI2_CLK(EIM_CS0) | ||
| 41 | CSPI2_CS0(CSIO_DAT11) | 42 | SD3_DATA2 | SDIO功能预留接口 | 预留接口,可自行修改为GPIO等功能 | ||
| 43 | SD3_DATA3 | SDIO功能预留接口 | 预留接口,可自行修改为GPIO等功能 | 44 | SD3_CMD | ||
| 45 | EIM_A25 | 预留接口,可自行修改为GPIO等功能 | 46 | SD3_CLK | |||
| 47 | SD3_DATA0 | SDIO功能预留接口 | 预留接口,可自行修改为GPIO等功能 | 48 | SD3_DATA1 | ||
| 49 | PWM3(SD1_DAT1) | PWM功能 | 对应节点/sys/class/pwm/* | 50 | PWM4(SD1-CMD) | PWM功能 | 对应节点/sys/class/pwm/* |
性能参数
| 模块 | 数值 | |
|---|---|---|
|
摄像头模块 捕获帧率(帧/S) |
OV5640 (500W) 640*480 | 31 |
| OV5640 (500W) 2560x2048 | 1 | |
| TVP5150(720x576) | 16 | |
|
wifi模块 网速(1Mbit/s=8Mbps) |
USBwifi RT5370 | |
| RTL8189 (SD IO wifi) | ||
| RTL8723+BT-usb | 24Mbit/s | |
| 3G/4G模块 | USB3G IEEE802.11n 150Mbps | |
| 插针接口3G | ||
| 4G SIM7600 | 下载7.11Mbps 上传0.76Mbps | |
| 4G SIM7100 | 下载7.98Mbps 上传0.82Mbps | |
| SD卡 | sd卡读速度 | 435MB/s |
| sd卡写速度 | 50MB/s | |
| SATA | 硬盘写速度 | 350MB/s |
| 硬盘写速度 | 73MB/s | |
| 串口模块(最高波特率) | COM1 | 115200 |
| COM2 | ||
| 串口485 | ||
| UART1(tty0) | 115200 | |
| UART2(tty1) | 115200 | |
| UART3(tty2) | 115200 | |
| UART4(tty3) | 115200 | |
| UART5(tty4) | ||
| 5串口扩展板 | 115200 | |
| 2*232串口扩展模块 | ||
|
网卡模块 (移植iperf测网速) |
DM9000 | |
| DM9000CEP | ||
| LAN8710A-EZK | ||
| RTL8211E-VB-CG | ||
| AR8035(工业级,不开源) | 450Mbits/s | |
| USB 模块 | USB host read | 440MB/s |
| USB host write | 60MB/s | |
| USB OTG | 11M/s | |
功耗参数
- 5寸高清电容屏(800*480)
| 工作条件 | 电源电压 | 电源电流 | 基本功耗 | 电源电流峰值 | 最大功耗 |
|---|---|---|---|---|---|
| 系统启动过程 | 12v | 300mA | 3.6w | 580mA | 6.96w |
| 待机基本界面 | 12v | 230mA | 2.76w | 450mA | 5.4w |
| 播放视频 | 12v | 250mA | 3w | 500mA | 6w |
| 接通网络 |
- 7寸电容屏(800*480)
| 工作条件 | 电源电压 | 电源电流 | 基本功耗 | 电源电流峰值 | 最大功耗 |
|---|---|---|---|---|---|
| 系统启动过程 | 12v | 400mA | 4.8w | 650mA | 7.8w |
| 待机基本界面 | 12v | 250mA | 3w | 500mA | 6w |
| 播放视频 | 12v | 300mA | 3.6w | 550mA | 6.6w |
| 接通网络 |
- 7寸高清屏(1024*600)
| 工作条件 | 电源电压 | 电源电流 | 基本功耗 | 电源电流峰值 | 最大功耗 |
|---|---|---|---|---|---|
| 系统启动过程 | 12v | 450mA | 5.4w | 700mA | 8.4w |
| 待机基本界面 | 12v | 300mA | 3.6w | 550mA | 6.6w |
| 播放视频 | 12v | 350mA | 4.2w | 500mA | 6w |
| 接通网络 |
- 10.1寸高清电容屏(1366*768)
| 工作条件 | 电源电压 | 电源电流 | 基本功耗 | 电源电流峰值 | 最大功耗 |
|---|---|---|---|---|---|
| 系统启动过程 | 12v | 430mA | 5.16w | 700mA | 8.4w |
| 待机基本界面 | 12v | 410mA | 4.92w | 650mA | 7.8w |
| 播放视频 | 12v | 500mA | 6w | 660mA | 7.92w |
| 接通网络 |
- 不带屏功耗
| 工作条件 | 电源电压 | 电源电流 | 基本功耗 | 电源电流峰值 | 最大功耗 |
|---|---|---|---|---|---|
| 系统启动过程 | 12v | 180mA | 2.16w | 400mA | 4.8w |
| 待机基本界面 | 12v | 110mA | 1.32w | 110mA | 1.32w |
| 播放视频 | |||||
| 接通网络 |
Linux开发指南
编译bootloader固件
下载uboot源码:TQIMX6_uboot_V3.14.6.tar.bz2
将其拷贝到根目录/opt目录下,然后在ubuntu系统中执行!
#cd /opt
#tar xvjf TQIMX6_uboot_Vx.xx.tar.bz2 -C /
#cd /opt/EmbedSky/TQIMX6/uboot-imx/
#./build.sh然后等待编译完成,编译完成后可以看到在此目录下有u-boot.imx文件,此文件可以直接烧录到板卡中启动。
编译kernel固件
下载linux源码: TQIMX6_uboot_V3.15.0.tar.bz2 将其拷贝到根目录/opt目录下,然后在ubuntu系统中执行
#cd /opt
#tar xjf TQIMX6_linux_Vx.xx.tar.bz2 -C /
#cd /opt/EmbedSky/TQIMX6/kernel_imx/
#./build.sh然后等待编译完成,编译完成后可以看到在此目录下有内核zImage文件;和imx6q-sabresd.dtb,e9v2-sabresd.dtb,e9v3-sabresd.dtb,分别对应imx6q-CoreC板卡imx6q-E9v2板卡,imx6q-E9v3板卡的设备树,具体使用的是哪款板卡可以查看官网的产品信息。
制作rootfs固件
说明:rootfs提供了三种系统形式,请根据自己需求选择使用: rootfs_qt5_IMX6_for_linux_Vx.x_Rx.x.tgz rootfs_ubuntu_minimal_IMX6_for_linux_Vx.x_R1.x.tgz rootfs_ubuntu_IMX6_for_linux_Vx.x_R1.x.tgz 下载文件系统源文件(qt5):rootfs_qt5_IMX6_for_linux_Vx.x.tgz,将其拷贝到根目录/opt/tqimx6q目录下,创建目录/opt/tqimx6q/rootfs_qt5然后在ubuntu系统中执行
#cd /opt/tqimx6q
#mkdir -p /opt/tqimx6q/rootfs_qt5
#tar xvzf rootfs_qt5_IMX6_for_linux_Vx.x.tgz -C /opt/tqimx6q/rootfs_qt5
#cd /opt/tqimx6q/rootfs_qt5此时完成了文件系统源文件的解压步骤,接着可以自行修改定制qt5的文件系统,如添加修改文件等。 1.制作tgz文件:
#cd /opt/tqimx6q/rootfs_qt5
#tar czf ../rootfs.tgz *执行完成之后可以在/opt/tqimx6q目录下看到rootfs.tgz文件 2.制作img文件:
#sudo apt-get install android-tools-fsutils
#cd /opt/tqimx6q/
#mkimg rootfs_qt5执行成功之后可以在/opt/tqimx6q/目录下看到rootfs.img文件。 注:文件镜像制作成.tgz,和.img文件,具体用哪个以使用的烧写工具的说明为准。
Kernel源码简介
内核使用的是 kernel_4.1.15。以下的路径都是在相对于内核根目录而言。由于驱动代码牵涉较广,难以将文件做到一一描述,所以以下提及的驱动源码只是相对主要或者是修改频率比较高的文件。
| 驱动 | 在内核中的源码位置 | 系统中的设备名称 |
|---|---|---|
| emmc/sdcard 驱动 | drivers/mmc/host/sdhci-esdhc-imx.c drivers/mmc/host/sdhci.c drivers/mmc/host/sdhci-pltfm.c | /dev/mmcblk* |
| LCD 与 LVDS 驱动 | drivers/video/fbdev/mxc/* | /dev/fb* |
| 电阻触摸屏驱动 | drivers/input/touchscreen/tsc2007.module | dev/input/event* |
| 电容触摸屏驱动 | drivers/input/touchscreen/edt-ft5x06.module goodix.module | dev/input/event* |
| 有线网络驱动 | drivers/net/phy/* | eth0 |
| 串口驱动 | drivers/tty/serial/imx.c drivers/tty/serial/mxs-auart.c drivers/tty/serial/serial_core.c | /dev/ttySAC* |
| sgtl5000声卡驱动 | sound/soc/codecs/* | /dev/snd/* |
| I2C驱动 | drivers/i2c/busses/i2c-imx.c | /dev/i2c-* |
| 按键驱动 | drivers/input/keyboard/gpio_keys.c | dev/input/event* |
| 红外驱动 | drivers/input/keyboard/tq_hs0038.c | dev/input/event* |
| 背光灯驱动 | drivers/video/backlight/pwm_bl.c drivers/video/backlight/backlight.c | /sys/class/backlight/* |
| Pwm驱动 | drivers/pwm/pwm-imx.c | /sys/class/pwm/* |
| RTC驱动 | drivers/rtc/rtc-pcf8563.c | /dev/rtc0 |
| 看门狗驱动 | drivers/watchdog/imx2_wdt.c | /dev/watchdog |
| 多媒体摄像头驱动 | drivers/media/platform/mxc/capture/* | /dev/video* |
| USB控制驱动 | drivers/usb/phy/phy-mxs-usb.c | /dev/sda* |
编译QT程序
1.下载qt5.5_example_V1.0.tgz 2.编译,具体操作查看TQIMX6Q(V3)QT5.5开发境搭建_2019-11-15.pdf
二次封装库
- 查看文档:天嵌二次封装库
- 下载库: linux_lib_v1.0.1.tar
例程使用&外设测试
1.下载demo按照相关说明参考使用例程。
2.具体操作查看TQIMX6Q功能测试手册V1.1
OpenIL开发指南
OpenIL是开放式工业Linux的简称,可为工业用户在实施工业物联网的过程中提供全面的支持,其特性包括:时间敏感网络、工业安全、工业现场网络和总线、支持图像化HMI、远程管理配置、开源生态、支持硬实时等。
编译bootloader固件
下载uboot源码TQIMX6_uboot_IMX6_for_OpenIL_Vx.xx.tar.bz2 ,将其拷贝到根目录/opt目录下,然后在ubuntu系统中执行
#cd /opt
#tar xvjf TQIMX6_uboot_IMX6_coreC_for_OpenIL_Vx.xx.tar.bz2 -C /
#cd /opt/EmbedSky/TQIMX6/uboot-imx/
#./build.sh然后等待编译完成,编译完成后可以看到在此目录下有u-boot.imx文件,此文件可以直接烧录到板卡中启动。
编译kernel固件
下载linux源码TQIMX6_linux_for_OpenIL_Vx.xx.tar.bz2,将其拷贝到根目录/opt目录下,然后在ubuntu系统中执行
#cd /opt
#tar xjf TQIMX6_IMX6_for_OpenIL_Vx.xx.tar.bz2 -C /
#cd /opt/EmbedSky/TQIMX6Q/linux-OpenIL-linux
#./build.sh然后等待编译完成,编译完成后可以看到在此目录下有内核zImage文件;和imx6q-sabresd.dtb,应用于imx6q-CoreC板卡。
制作rootfs固件
下载文件系统源文件(qt5):rootfs_qt5_IMX6_for_OpenIL_Vx.x.tgz,将其拷贝到根目录/opt/tqimx6q目录下,创建目录/opt/tqimx6q/rootfs_qt5然后在ubuntu系统中执行
#cd /opt/tqimx6q
#mkdir -p /opt/tqimx6q/rootfs_qt5
#tar xvzf rootfs_qt5_IMX6_for_OpenIL_Vx.x.tgz -C /opt/tqimx6q/rootfs_qt5
#cd /opt/tqimx6q/rootfs_qt5此时完成了文件系统源文件的解压步骤,接着可以自行修改定制qt5的文件系统,如添加修改文件等。
- 制作tgz文件:
#cd /opt/tqimx6q/rootfs_qt5 #tar czf ../rootfs.tgz *执行完成之后可以在/opt/tqimx6q目录下看到rootfs.tgz文件
- 制作img文件:
#cd /opt/tqimx6q/ #sudo mkimg rootfs_qt5执行成功之后可以在/opt/tqimx6q/目录下看到rootfs.img文件。
注:文件镜像制作成.tgz,和.img文件,具体用哪个以使用的烧写工具的说明为准。Kernel源码简介
内核使用的是 kernel_4.9.35。以下的路径都是在相对于内核根目录而言。由于驱动代码牵涉较广,难以文件的做到一一讱述,所以以下提及的驱动源码只是相对主要或者是修改频率比较高的文件。
| 驱动 | 在内核中的源码位置 | 系统中的设备名称 |
|---|---|---|
| emmc/sdcard 驱动 | drivers/mmc/host/sdhci-esdhc-imx.c drivers/mmc/host/sdhci.c drivers/mmc/host/sdhci-pltfm.c | /dev/mmcblk* |
| LCD 与 LVDS 驱动 | drivers/video/fbdev/mxc/* | /dev/fb* |
| 电阻触摸屏驱动 | drivers/input/touchscreen/tsc2007.module | dev/input/event* |
| 电容触摸屏驱动 | drivers/input/touchscreen/edt-ft5x06.module goodix.module | dev/input/event* |
| 有线网络驱动 | drivers/net/phy/* | eth0 |
| 串口驱动 | drivers/tty/serial/imx.c drivers/tty/serial/mxs-auart.c drivers/tty/serial/serial_core.c | /dev/ttySAC* |
| sgtl5000声卡驱动 | sound/soc/codecs/* | /dev/snd/* |
| I2C驱动 | drivers/i2c/busses/i2c-imx.c | /dev/i2c-* |
| 按键驱动 | drivers/input/keyboard/gpio_keys.c | dev/input/event* |
| 红外驱动 | drivers/input/keyboard/tq_hs0038.c | dev/input/event* |
| 背光灯驱动 | drivers/video/backlight/pwm_bl.c drivers/video/backlight/backlight.c | /sys/class/backlight/* |
| Pwm驱动 | drivers/pwm/pwm-imx.c | /sys/class/pwm/* |
| RTC驱动 | drivers/rtc/rtc-pcf8563.c | /dev/rtc0 |
| 看门狗驱动 | drivers/watchdog/imx2_wdt.c | /dev/watchdog |
| 多媒体摄像头驱动 | drivers/media/platform/mxc/capture/* | /dev/video* |
| USB控制驱动 | drivers/usb/phy/phy-mxs-usb.c | /dev/sda* |
例程使用
- 下载linux例程,天嵌提供部分接口的例程供参考。
- 按照以下相关demo说明参考使用例程。
UART demo
(8)拷贝uart文件夹到Ubuntu任意目录下
(9)进入uart目录
(10)#cd uart
(11)执行编译脚本(TQIMX6Q系列使用5.3.1的交叉编译器,其他平台参考使用)
(12)#./build.sh
(13)短接测试串口的RX和TX
(14)将执行程序拷贝至文件系统,进行收发数据测试,执行以下命令即可测试/dev/ttySAC1是否可以正常收发数据#./uart_app /dev/ttySAC1 -b 115200 -rw 123asd -asc -l注:/dev/ttySAC1为你所测试自收发的串口,可用串口有/dev/ttySAC1~3 /dev/ttySAC0为调试串口,串口有输出即可证明串口正常。
SPI demo
(7)拷贝spi文件夹到Ubuntu任意目录下
(8)进入spi目录#cd spi
(9)执行编译脚本(TQIMX6Q系列使用5.3.1的交叉编译器,其他平台参考使用)#./build.sh
(10)将/dev/spidev1.0的发送与接收引脚短接(如果需要测试其他的spi需要修改spi_test.c的static const char *device参数)
(11)执行以下命令,发送指定数据#spi_test -s 50000 -p "ABCDEFG"
(12)若没有指定发送内容则发送以下数组uint8_t default_tx[] = { 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0x40, 0x00, 0x00, 0x00, 0x00, 0x95, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xF0, 0x0D, };CAN demo
(8)拷贝can文件夹到Ubuntu任意目录下
(9)进入can目录#cd can
(10)执行编译脚本(TQIMX6Q系列使用5.3.1的交叉编译器,其他平台参考使用)#./build.sh
(11)短接can0 can1(H对H,L对L)
(12)将执行程序拷贝至文件系统,进行收发数据测试,执行以下命令即可测试CAN0、CAN1 之间是否可以正常收发数据#./can_testGPIO demo
(6)GPIO调试说明
d./sys/class/gpio/export文件用于通知系统需要导出控制的GPIO引脚编号,/sys/class/gpio/export写编号,比如以下命令,命令成功后生成/sys/class/gpio/gpio50目录,如果没有出现相应的目录,说明此引脚不可导出;
说明:计算引脚编号,引脚编号 = 控制引脚的寄存器基数 + 控制引脚寄存器位数#echo 50 > /sys/class/gpio/export
e.direction文件,定义输入输入方向;#echo out > /sys/class/gpio/gpio50/direction
f.value文件是端口的数值,为1或0. echo 1 > value#echo 1 > /sys/class/gpio/gpio50/value #echo 0 > /sys/class/gpio/gpio50/value(7)拷贝gpio文件夹到Ubuntu任意目录下
(8)进入gpio目录#cd gpio
(13)执行编译脚本(TQIMX6Q系列使用5.3.1的交叉编译器,其他平台参考使用)#./build.sh
(9)gpio_in num1~num2 value
将gpio配置成输入模式,gpio口从num1到num2,将读取到的值打印出来,并与给定的value比较,不一致则会在屏幕打印ERROR
如 gpio_in 7~14 1
将gpio7至gpio14配置成输入模式,将读取到的value打印出来,并与1(高电平)比较,若读取的值与指定的不一致则会打印ERROR
gpio_out pin~pin value
将gpio配置成输出模式,gpio口从num1到num2,将value值输出到io口
如 gpio_out 7~14 1
将gpio7至gpio14配置成输出模式,输出高电平;
(10)使用万用表测量你所控的gpio脚Capture demo
(5)拷贝capture文件夹到Ubuntu任意目录下
(6)进入capture目录#cd capture
(14)执行编译脚本(TQIMX6Q系列使用5.3.1的交叉编译器,其他平台参考使用)#./build.sh
(7)接入屏幕及摄像头(源码经测试:支持tq-ov5640,tvp-5150,usb-摄像头的使用)
(8)运行指令示例:./v4l2_camera -if 0 -of 0 -t 5 -fr 30 -m 0 -t 5 -di /dev/video2 -v 2 ./v4l2_camera -if 1 -of 0 -t 5 -fr 30 -m 0 -t 5 -di /dev/video0 -r 1 ./v4l2_camera -iw 720 -ih 576 -ow 800 -oh 480 -fr 30 -m 0 -t 5 ./v4l2_camera -iw 640 -ih 480 -ow 1366 -oh 768 -fr 30 -m 0 -t 5
常用设备使用方法
注:本章节的使用方法仅在资源下载的镜像及源码版本上适用,其他版本的镜像及源码,不予保证功能正常使用,请以各自版本说明为准。
4G全网通拨号上网
本方法仅保证适用于tq-SIM7100c,SIM7600c等模块,在板卡串口终端上执行
#cd /test_file/
#./link_4g.shN720模块使用:
#cd /etc/ppp/peers/
#pppd call n720_init &修改&取消默认启动程序
修改脚本/etc/embedsky_conf:
将脚本内的最后一行:/opt/tqPainter &替换成自己的程序, 如果没有这行, 直接在末尾添加你的程序路径。
Android开发指南
编译android固件
注:在编译android源码前请先查看安装编译环境章节建好 android 的编译环境。 下载Android6.0源码。 如果是单包文件:TQIMX6_android_Vx.xx.tar.bz2 ,将其拷贝到根目录/opt目录下,然后在ubuntu系统中执行
#cd /opt
#tar xvjf TQIMX6_android_Vx.xx.tar.bz2 -C /
#cd /opt/EmbedSky/TQIMX6/android-6.0.1-2.1.0如果是多包组合文件:TQIMX6_android_Vx.xxs.tar.bz2a*文件,共有tar.bz2aa~tar.bz2ae五个分包文件,将其所有拷贝至/opt目录下,然后在Ubuntu系统中执行
#cd /opt
#cat TQIMX6_android_Vx.xxs.tar.bz2a* | tar xvj
#cd /opt/EmbedSky/TQIMX6/android-6.0.1-2.1.0
#./build.sh all 8编译完成提示:(酷睿i5-8g内存,第一次编译大概:3小时左右)
#### make completed successfully (01:14 (mm:ss)) ####Android compare success ! Use time: 0h1m15s, 75seconds! 已成功完成Android编译!总用时:0小时1分15秒;合计:75秒!
镜像生成路径: u-boot: out/target/product/sabresd_6dq/u-boot.imx 内核: imx6q-CoreC:out/target/product/sabresd_6dq/boot-imx6q.img imx6q-E9v2:out/target/product/sabresd_6dq/boot-e9v2.img imx6q-E9v3:out/target/product/sabresd_6dq/boot-e9v3.img 注:分别对应imx6q-CoreC板卡imx6q-E9v2板卡,imx6q-E9v3板卡的内核镜像,使用烧写时,需要重命名为“boot.img”,详见烧写文档。 system: out/target/product/sabresd_6dq/system.img recovery: imx6q-CoreC:out/target/product/sabresd_6dq/recovery-imx6q.img imx6q-E9v2:out/target/product/sabresd_6dq/recovery-e9v2.img imx6q-E9v3:out/target/product/sabresd_6dq/recovery-e9v3.img
Android源码简介
Android 的源码包中包含有内核源码,uboot 源码,与文件系统源码。 uboot 源码位于:bootable/bootloader/uboot-imx/ 内核源码位于:kernel_imx/ 其它的即为 android 文件系统源码。 Android6.0使用的内核版本是是 kernel_4.1.15。以下的路径都是在相对于内核根目录而言。由于驱动代码牵涉较广,难以将所有文件做到一一讲述,所以以下提及的驱动源码只是相对主要或者是修改频率比较高的文件。
| 驱动 | 在内核中的源码位置 | 系统中的设备名称 |
|---|---|---|
| emmc/sdcard 驱动 | drivers/mmc/host/sdhci-esdhc-imx.c drivers/mmc/host/sdhci.c drivers/mmc/host/sdhci-pltfm.c | /dev/mmcblk* |
| LCD与LVDS驱动 | drivers/video/fbdev/mxc/* | /dev/fb* |
| 电阻触摸屏驱动 | drivers/input/touchscreen/tsc2007.module | dev/input/event* |
| 电容触摸屏驱动 | drivers/input/touchscreen/edt-ft5x06.module goodix.module | dev/input/event* |
| 有线网络驱动 | drivers/net/phy/* | eth0 |
| 串口驱动 | drivers/tty/serial/imx.c drivers/tty/serial/mxs-auart.c drivers/tty/serial/serial_core.c | /dev/ttySAC* |
| sgtl5000声卡驱动 | sound/soc/codecs/* | /dev/snd/* |
| I2C驱动 | drivers/i2c/busses/i2c-imx.c | /dev/i2c-* |
| 按键驱动 | drivers/input/keyboard/gpio_keys.c | dev/input/event* |
| 红外驱动 | drivers/input/keyboard/tq_hs0038.c | dev/input/event* |
| 背光灯驱动 | drivers/video/backlight/pwm_bl.c drivers/video/backlight/backlight.c | /sys/class/backlight/* |
| Pwm驱动 | drivers/pwm/pwm-imx.c | /sys/class/pwm/* |
| RTC驱动 | drivers/rtc/rtc-pcf8563.c | /dev/rtc0 |
| 看门狗驱动 | drivers/watchdog/imx2_wdt.c | /dev/watchdog |
| 多媒体摄像头驱动 | drivers/media/platform/mxc/capture/* | /dev/video* |
| USB控制驱动 | drivers/usb/phy/phy-mxs-usb.c | /dev/sda* |
修改打包固件
1.修改system.img固件 将system.img文件拷贝到/opt目录下,然后执行以下命令
#mkdir /opt/system
#mount -t ext4 system.img system然后可以往/opt/system目录下看到system.img文件的内容,并修改,修改完后执行以下命令会重新打包system.img
#umount system
例程使用
Uart demo
下载天嵌提供Android的UART测试串口测试APK程序serialportApp.apk,如果源码没有此程序,可以将其拷贝至./device/fsl/sabresd_6dq/files/serialportApp.apk目录
进入
#vi ./device/fsl/imx6/sabresd_6dq.mk
找到PRODUCT_COPY_FILES,添加一行
device/fsl/sabresd_6dq/files/serialportApp.apk:system/app/serialportApp.apk
保存重新编译system.img即可在android界面上看到UART测试程序
短接你要测试的UART的RT和TX,即可使用UART程序进行测试
Can demo
下载天嵌提供Android的CAN测试串口测试APK程序serialportApp.apk,如果源码没有此程序,可以将其拷贝至./device/fsl/sabresd_6dq/files/CanServer.apk目录
进入
#vi ./device/fsl/imx6/sabresd_6dq.mk
找到PRODUCT_COPY_FILES,添加一行
device/fsl/sabresd_6dq/files/serialportApp.apk:system/app/CanServer.apk
保存重新编译system.img即可在android界面上看到CAN测试程序
短接can0、can1的高低脚,即可使用CAN测试程序进行测试
常见问题解答
FAQ
FAQ详细信息,请查看《TQIMX6Q_FAQ》文档,文档总结了使用TQIMX6Q系列平台所遇到的部分问题及解决方法,如果查看文档仍未解决问题,请拨打技术支持电话或者发送邮件到技术支持邮箱寻求技术支持。
技术支持说明
天嵌科技致力于高科技产业发展提供技术与服务,为广大客户提供嵌入式技术软硬件开发工具与解决方案,致力于ARM内核系列CPU的开发和应用,提供低功耗、高性价比的嵌入式产品,提供针对性强、量身定制的客户化设计;无论是新设计还是对现有产品的改型设计,我们都会为您提供高品质的开发服务。 由于时间有限,手册难免存在纰漏和错误,诚恳的希望各位读者批评和指正。关于修改的bug,我们会在第一时间在论坛上更新,论坛建有技术支持专区,欢迎大家遇到问题去里面寻找解决方法。还可以通过邮件(support@embedsky.net)与我们联系(为了能够方便跟进记录,请参照邮件落款模板发送邮件)。希望能结识更多的朋友,大家一起共同进步。
- 官方网站:http://www.embedsky.com
- 论坛:http://www.armbbs.net
- 淘宝店铺:https://embedsky.taobao.com
- 技术支持邮件:support@embedsky.net
- 技术支持电话:020-38373101-817 020-38373101-810(IMX6Q) 020-38373101-814(IMX6UL) 020-38373101-818(335X)
邮件落款模板
烧写镜像文件版本号:xxx (例如:V2.0_R1.0,版本号在文件名后面有) 使用板卡、系统:xxx (例如:e9 android 4.3) 联系人:xxxxx 联系方式:xxxxx 公司:xxxxxx (例如:天嵌科技、学校等等)
常规技术支持范围
1.使用我司的镜像与开发板。 2.系统或硬件出现问题时(不包含客户自行开发)
资源下载
Linux资源
Android资源
Linux OpenIL固件源码
linux例程
Android例程
出厂镜像合集
Linux平台工具
windows平台工具
配套电路图
配套芯片手册